

2023-07-12
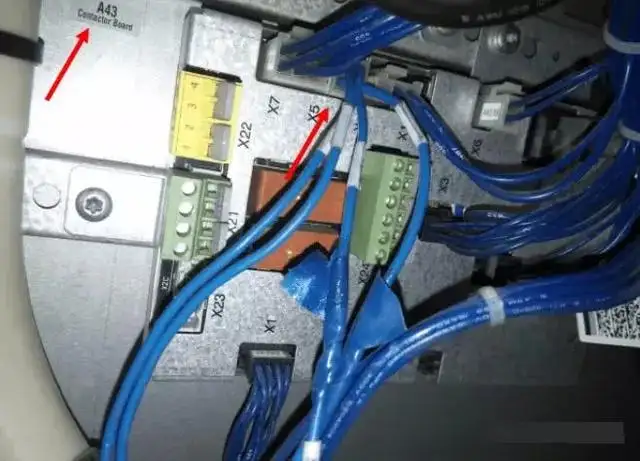
2. رسیدگی به خطای اتصال کوتاه برد اتصال کوتاه ماژول برق ربات ABB
عوامل انسانی: سخت افزار تعویض داغ بسیار خطرناک است و بسیاری از خرابی های برد مدار به دلیل تعویض داغ است.استفاده نادرست از نیرو هنگام قرار دادن کارت ها و دوشاخه ها با برق می تواند باعث آسیب به رابط ها، تراشه ها و غیره شود و منجر به آسیب به برد مدار ربات شود.با افزایش زمان استفاده از ربات ها، قطعات روی مدار ربات به طور طبیعی پیر می شوند و منجر به خرابی برد مدار ربات می شود.
عوامل محیطی: به دلیل نگهداری نادرست توسط اپراتور، برد مدار ربات با گرد و غبار پوشیده شده است که می تواند باعث اتصال کوتاه سیگنال شود.
3. چه زمانی نیاز به پشتیبان گیری از ربات های صنعتی است
پس از اولین روشن شدن دستگاه جدید.
قبل از انجام هر گونه اصلاح
3. پس از تکمیل اصلاحات.
4. اگر ربات های صنعتی مهم هستند، باید هفته ای یک بار به صورت منظم انجام شوند.
5. بهتر است از درایو USB نیز یک نسخه پشتیبان تهیه کنید.
6. به طور مرتب بک آپ های قدیمی را حذف کنید تا فضای هارد دیسک آزاد شود.
4. نحوه رسیدگی به وضعیتی که ربات روشن است و آویز آموزشی رابط زیر را نمایش می دهد
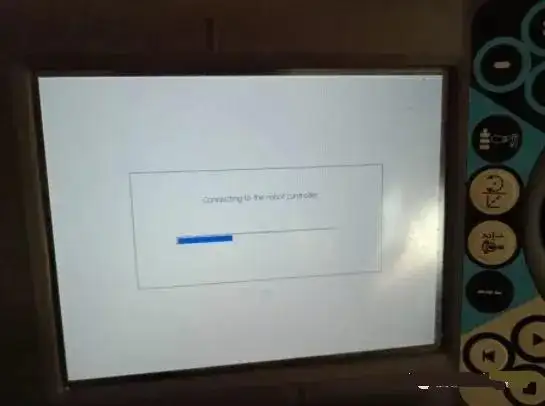 حالت فوق به این صورت است که بین آویز آموزشی و کنترل کننده اصلی ربات ارتباطی برقرار نیست و دلایل عدم برقراری ارتباط عبارتند از:
حالت فوق به این صورت است که بین آویز آموزشی و کنترل کننده اصلی ربات ارتباطی برقرار نیست و دلایل عدم برقراری ارتباط عبارتند از:
1. میزبان ربات معیوب است.
2. کارت CF داخلی (کارت SD) میزبان ربات معیوب است.
3. کابل شبکه بین آویز آموزشی و هاست شل و غیره است.
روش پردازش: 1. بررسی کنید که آیا هاست نرمال است و آیا کارت SD موجود در هاست عادی است.
2. بررسی کنید که آیا کابل شبکه از آویز آموزشی به هاست به درستی وصل شده است یا خیر.
5- منظور از یادآوری زمان تعمیر و نگهداری 10106 زمانی که ربات پیغام هشدار را نمایش می دهد چیست؟
این وضعیت یک یادآوری تعمیر و نگهداری دوره ای هوشمند ربات ABB است.
6. هنگامی که ربات وارد حالت روشن می شود، چگونه می توان با نقص سیستم برخورد کرد؟
1. ربات را یکبار ریستارت کنید.
اگر نه، آویز آموزشی را برای هشدارهای هشدار دقیق تر بررسی کنید و اقدام کنید.
3. راه اندازی مجدد.
4. اگر هنوز نمی تواند منتشر شود، راه اندازی B را امتحان کنید.
5. اگر باز هم کار نمی کند، لطفاً راه اندازی P را امتحان کنید.
6. اگر باز هم کار نمی کند، لطفا I startup را امتحان کنید (با این کار ربات به تنظیمات کارخانه باز می گردد، مراقب باشید).
7. آیا پشتیبان ربات می تواند توسط چند روبات به اشتراک گذاشته شود؟
خیر. به عنوان مثال، نسخه پشتیبان ربات A را فقط می توان برای ربات A استفاده کرد، نه برای ربات B یا C، زیرا می تواند باعث خرابی سیستم شود.
8. چه فایل هایی را می توان در پشتیبان گیری ربات به اشتراک گذاشت؟
اگر دو ربات از یک مدل و پیکربندی باشند.میتوانید برنامه RAPID و فایل EIO را به اشتراک بگذارید، اما پس از اشتراکگذاری، قبل از استفاده معمولی باید تأیید شود.
9. منشا مکانیکی ربات ها چیست؟منشا مکانیکی کجاست؟
هر یک از شش موتور سروو ربات دارای منشاء مکانیکی ثابت منحصر به فردی است.تنظیم نادرست منشا مکانیکی ربات مشکلاتی مانند حرکت محدود یا نادرست ربات، ناتوانی در راه رفتن در مسیر مستقیم و آسیب جدی به ربات را به همراه خواهد داشت.
10. چگونه می توان آلارم اکشن مانیتورینگ ربات 50204 را پاک کرد؟
1. پارامترهای نظارت بر عملکرد ربات (در منوی نظارت بر عملکرد پانل کنترل) را برای مطابقت با وضعیت واقعی تغییر دهید.
2. از دستور AccSet برای کاهش شتاب ربات استفاده کنید.
3. کاهش v در speed data_ گزینه rot.
11. چگونه می توان با زنگ هشدار "50296، تفاوت داده های حافظه SMB" در هنگام روشن شدن ربات برای اولین بار استفاده کرد؟
1. کالیبراسیون را از منوی اصلی ABB انتخاب کنید.
2. روی ROB_ کلیک کنید. 1. وارد صفحه کالیبراسیون شده و SMB memory را انتخاب کنید.
3. "Advanced" را انتخاب کنید، وارد شده و روی "Clear Control Cabinet Memory" کلیک کنید.
4. پس از تکمیل، روی "Close" و سپس روی "Update" کلیک کنید.
5. «تعویض کابینت کنترل یا بازوی روباتیک، به روز رسانی کابینت کنترل با داده های حافظه SMB» را انتخاب کنید.
12. چگونه سرعت حرکت مسیر ربات را در برنامه RAPID شخصی سازی کنیم؟
1. از منوی اصلی آویز آموزشی برنامه Data را انتخاب کنید.
2. پس از یافتن نوع داده Speeddata، روی New کلیک کنید.
3. روی مقدار اولیه کلیک کنید، و معانی چهار متغیر Speeddata عبارتند از: v_ TCP نشان دهنده سرعت خطی اجرای ربات، v_ Rot نشان دهنده سرعت چرخش ربات، v_ Leax نشان دهنده سرعت عملیات خطی محور خارجی است. ، v_ Reax نشان دهنده سرعت چرخش محور خارجی است.اگر محور خارجی وجود نداشته باشد، دو مورد آخر نیازی به اصلاح ندارند.
4. داده های سفارشی شده را می توان در برنامه RAPID فراخوانی کرد.
13. عیب یابی 6 عیب رایج در تعمیر موتور سروو ربات ABB
1. چگونه می توان خطای سرریز شمارنده خطای موتور را در حین چرخش با سرعت بالا مدیریت کرد؟
خطای سرریز شمارنده خطای موتور در طول چرخش با سرعت بالا رخ می دهد.
اقدام متقابل 1: بررسی کنید که آیا سیم کشی کابل برق موتور و کابل انکودر صحیح است و آیا کابل آسیب دیده است.
خطای سرریز شمارنده خطای موتور هنگام وارد کردن یک پالس فرمان طولانی رخ می دهد.
خطای سرریز شمارنده خطای موتور در حین کار رخ داد.
اقدام متقابل 2: مقدار تنظیم سطح سرریز شمارشگر خطا را افزایش دهید.کاهش سرعت چرخش؛افزایش زمان شتاب و کاهش سرعت؛بار بسیار سنگین است و لازم است موتوری با ظرفیت بیشتر را از ابتدا انتخاب کنید یا بار را کاهش دهید و سازمان های انتقال مانند کاهنده ها را برای افزایش بار نصب کنید.
2. در صورت عدم کارکرد با خروجی پالس چه باید کرد؟
نظارت بر مقدار فعلی پالس خروجی کنترلر و اینکه آیا چراغ خروجی پالس چشمک می زند یا خیر، تصدیق کنید که پالس فرمان برآورده شده است و اکنون به طور معمول خروجی می دهد.
بررسی کنید که آیا کابل کنترل، کابل برق، و کابل رمزگذار از کنترل کننده به درایور به درستی سیمکشی شده، آسیب دیده است یا در تماس ضعیف است.
بررسی کنید که آیا ترمز سروو موتور با ترمز اکنون باز شده است یا خیر.
نظارت کنید که آیا پانل درایور سروو ورودی دستورات پالس را تأیید می کند یا خیر.
دستور عملیات Run عادی است.
فرم کنترل باید فرم کنترل جهت را انتخاب کند.
آیا نوع پالس ورودی توسط درایور سروو با تنظیم پالس فرمان مطابقت دارد؟
اطمینان حاصل کنید که درایو جانبی چرخش مثبت متوقف شده است، سیگنال توقف درایو سمت چرخش، و سیگنال تنظیم مجدد خطای شمارنده وارد نشده است، بار قطع شده است و عملکرد بدون بار عادی است.سیستم مکانیکی را بررسی کنید.
3. اگر گزارش اضافه بار با بار وجود نداشته باشد، باید چه کار کنم؟
اگر زمانی رخ می دهد که سیگنال سروو Run متصل است و هیچ پالسی ساطع نمی شود:
سیم کشی کابل برق سروو موتور را بررسی کنید تا ببینید آیا تماس ضعیف یا آسیب کابل وجود دارد یا خیر.اگر سروو موتور با ترمز باشد، ترمز باید روشن باشد.آیا بهره حلقه سرعت خیلی زیاد است.آیا ثابت زمانی یکپارچه حلقه سرعت خیلی کوچک است؟
اگر سروو فقط در حین کار خراب می شود:
آیا بهره مدار آزیموت خیلی زیاد است.آیا دامنه تکمیل موقعیت یابی خیلی کم است.بررسی کنید که آیا روتور قفل شده روی شفت سروو موتور وجود ندارد و ماشین آلات را از ابتدا تنظیم کنید.
4. چگونه با صداها یا ارتعاشات غیرعادی در حین کار برخورد کنیم؟
سیم کشی سروو:
از کابل های برق استاندارد، کابل های رمزگذار، کابل های کنترل و کابل ها برای بررسی آسیب استفاده کنید.بررسی کنید که آیا منابع تداخلی در نزدیکی خط کنترل وجود دارد، و آیا آنها موازی یا خیلی نزدیک به کابل های برق جریان بالا در نزدیکی هستند.بررسی کنید که آیا تغییری در پتانسیل ترمینال اتصال به زمین وجود دارد تا از اتصال زمینی عالی اطمینان حاصل کنید.
پارامترهای سروو:
تنظیم بهره سروو بسیار بزرگ است و توصیه می شود به صورت دستی یا فعال پارامترهای سروو را از ابتدا تنظیم کنید.با اذعان به تنظیم ثابت زمانی فیلتر پاسخ سرعت، با مقدار اولیه 0، می توان مقدار تنظیم شده را با آزمایش افزایش داد.تنظیم نسبت دنده الکترونیکی بسیار بزرگ است و از بازگرداندن به تنظیمات کارخانه حمایت می کند.رزونانس بین سروو سیستم و سیستم مکانیکی، تست و تنظیم فرکانس و دامنه فیلتر ناچ.
سیستم مکانیکی:
کوپلینگ اتصال شفت موتور و سیستم تجهیزات منحرف شد و پیچ های نصب سفت نشدند.درگیری ضعیف قرقره ها یا چرخ دنده ها نیز می تواند منجر به تغییر در گشتاور بار شود.تست عملکرد بدون باراگر عملکرد بدون بار طبیعی است، بررسی کنید که آیا هر گونه ناهنجاری در قسمت اتصال سیستم مکانیکی وجود دارد یا خیر.اعتراف کنید که آیا اینرسی، گشتاور و سرعت بار بسیار زیاد است، عملکرد بدون بار را آزمایش کنید و اگر عملکرد بدون بار طبیعی است، بار را کاهش دهید یا درایور و موتور را با ظرفیت بیشتر جایگزین کنید.
5. چگونه می توان با کنترل جهت گیری و موقعیت یابی نادرست در حین تعمیر سروموتور ربات ABB برخورد کرد؟
ابتدا، تصدیق کنید که آیا مقدار واقعی پالس اعلام شده کنترلر با مقدار مورد انتظار مطابقت دارد یا خیر، و اگر نه، برنامه را بررسی و تصحیح کنید.
نظارت کنید که آیا تعداد دستورات پالس دریافت شده توسط درایور سروو با فرمان اعلام شده توسط کنترلر مطابقت دارد یا خیر.اگر نه، کابل کنترل را بررسی کنید.بررسی کنید که آیا تنظیم فرم پالس فرمان سروو با تنظیمات کنترلر مطابقت دارد، مانند CW/CCW یا جهت پالس.
تنظیم بهره سروو خیلی بزرگ است، لطفاً به صورت دستی یا فعال بهره سروو را از ابتدا تنظیم کنید.سروو موتور مستعد خطاهای انباشته در حین حرکت رفت و برگشتی است.توصیه می شود سیگنال مبدأ مکانیکی را تحت شرایط مجاز فرآیند تنظیم کنید و قبل از اینکه خطا از مقیاس مجاز فراتر رود، عملیات جستجوی مبدا را انجام دهید.خود سیستم مکانیکی دارای دقت پایین یا سازماندهی انتقال غیرعادی است (مانند انحراف کوپلینگ بین سروو موتور و سیستم تجهیزات).
6. تعمیر موتور سروو ربات ABB، عملیات کنترل جهت، خطای بیش از حد سرعت گزارش شده است.چگونه آن را اداره کنیم؟
به محض وصل شدن سیگنال سروو Run، راهاندازی میشود: بررسی کنید که آیا سیمکشی کابل برق سروو موتور و کابل انکودر درست است و آسیبی ندیده است.
14. ربات های صنعتی ABB چگونه تحت تعمیر و نگهداری روتین قرار می گیرند؟
قبل از عملکرد عادی "بازرسی ترمز"، لازم است ترمز موتور هر محور را بررسی کنید.روش بازرسی برای ترمز موتور به شرح زیر است:
1. محور هر بازوی رباتیک را تا حداکثر موقعیت بارگذاری آن اجرا کنید.
2. سوئیچ انتخاب حالت موتور روی کنترلر ربات را در وضعیت MOTORS OFF قرار دهید.
3. بررسی کنید که آیا شفت در موقعیت اصلی خود قرار دارد یا خیر.اگر بازوی مکانیکی پس از خاموش شدن موتور همچنان موقعیت خود را حفظ کند، نشان دهنده سالم بودن ترمز است.
خطر از دست دادن عملکرد کاهش سرعت (250mm/s).
نسبت دنده یا سایر پارامترهای حرکتی را از رایانه یا آویز آموزشی تغییر ندهید.این بر عملکرد کاهش سرعت (250 میلی متر بر ثانیه) تأثیر می گذارد.
15. در استفاده ایمن از وسایل کمک آموزشی باید به چند نکته توجه کرد:
دکمه فعال کننده دستگاه نصب شده بر روی آویز آموزشی، با فشار دادن تا نیمه، سیستم را به حالت MOTORS ON تغییر می دهد.هنگامی که دکمه رها شود یا به طور کامل فشار داده شود، سیستم به حالت MOTORS OFF تغییر می کند.
16. برای استفاده ایمن از وسایل کمک آموزشی باید اصول زیر رعایت شود:
1. هنگامی که دکمه Enabling device در حین برنامه نویسی یا اشکال زدایی نمی تواند عملکرد خود را از دست بدهد و ربات نیازی به حرکت نداشته باشد، بلافاصله دکمه Enabling device را رها کنید.
2. زمانی که پرسنل برنامه نویس وارد یک منطقه امن می شوند، باید همیشه آویز آموزشی را روی بدن خود حمل کنند تا از حرکت دادن ربات توسط دیگران جلوگیری شود.
17. هنگام کار در محدوده کاری بازوی رباتیک نکات زیر باید رعایت شود:
1. سوئیچ انتخاب حالت روی کنترلر باید در موقعیت دستی قرار گیرد تا بتواند دستگاه را قادر می سازد تا کامپیوتر را قطع کند یا از راه دور کار کند.
2. هنگامی که سوئیچ انتخاب حالت روشن است
3. به محور چرخش بازوی رباتیک توجه کنید، مراقب باشید که موها یا لباس ها با هم مخلوط شوند.همچنین به سایر اجزا یا تجهیزات انتخاب شده روی بازوی رباتیک توجه کنید.
4. ترمز موتور هر محور را بررسی کنید.
18. انحراف لمسی
پدیده 1: موقعیت لمس شده توسط انگشتان با فلش ماوس مطابقت ندارد.
دلیل: پس از نصب برنامه درایور، آویز آموزشی در حین کالیبراسیون به مرکز موقعیت چشم گاو به صورت عمودی برخورد نکرد.
راه حل: موقعیت را دوباره تنظیم کنید.
پدیده 2: برخی از مناطق دارای لمس دقیق هستند، در حالی که برخی دیگر دارای انحراف در تماس هستند.
علت: مقدار زیادی گرد و غبار یا رسوب روی نوارهای بازتاب صوتی اطراف صفحه لمسی موج صوتی سطحی جمع می شود که بر انتقال سیگنال های صوتی تأثیر می گذارد.
راه حل: صفحه لمسی را تمیز کنید، توجه ویژه ای به تمیز کردن نوارهای انعکاس امواج صوتی در همه طرف های صفحه لمسی داشته باشید.هنگام تمیز کردن، منبع تغذیه کارت کنترل صفحه لمسی را قطع کنید.
19. آموزش آویز لمس بدون پاسخ
پدیده: هنگام لمس صفحه، فلش های ماوس حرکت نمی کنند و تغییری در موقعیت ایجاد نمی شود.
دلیل: دلایل زیادی برای این پدیده وجود دارد که به شرح زیر است:
1. گرد و غبار یا مقیاس انباشته شده روی نوارهای بازتاب صوتی در اطراف صفحه نمایش لمسی موج صوتی سطحی بسیار جدی است و باعث می شود صفحه لمسی کار نکند.
2. نقص صفحه نمایش لمسی.
3. کارت کنترل صفحه لمسی خراب شده است.
4. خط سیگنال صفحه لمسی خراب شده است.
5. پورت سریال میزبان خراب است.
6. سیستم عامل آویز آموزشی دچار اختلال شده است.
7. خطای نصب درایور صفحه لمسی.
راه حل: چراغ نشانگر سیگنال صفحه لمسی را که در شرایط عادی به طور مرتب چشمک می زند، تقریباً یک بار در ثانیه مشاهده کنید.
هنگام لمس صفحه، آویز آموزشی سیاه می شود که یک مشکل پیچیده است.اگر نور پس زمینه صرفه جویی در انرژی تنظیم شده باشد، صفحه سیاه طبیعی است.اگر کلمه دوم در ناحیه کنترل سیستم به طور تصادفی اجرا شود، صفحه نمایش نیز سیاه می شود.اگر دو نکته اول حذف شدند، برای بررسی به آخرین سیستم عامل به روز رسانی کنید.
درخواست خود را مستقیماً برای ما ارسال کنید

