
محل منبع:
چین
نام تجاری:
YOUNGYOU
گواهی:
CE
شماره مدل:
LT-PG3-80B-PB
با ما تماس بگیرید

LT-PG3-80B-PB سه مرکز تعیین شده مکانیکی گیره مکانیکی دقت تکراری 0.01
توابع اصلی عامل نهایی انسان
Robot End Effector یک اصطلاح تخصصی در صنعت رباتیک است که درک آن برای بسیاری از کاربرانی که با صنعت رباتیک آشنایی ندارند ممکن است دشوار باشد.به عبارت ساده، افکتور پایانی به بخشی از ربات اطلاق می شود که معادل دست و انگشتان انسان است که می گیرد و کار می کند.وظیفه اصلی این قطعه گرفتن قطعات کار و انجام کارهای مختلف مرتبط با آن است و جزء اصلی بسیار مهم در محصولات روباتی است.
انواع اصلی افکتورهای انتهایی ربات
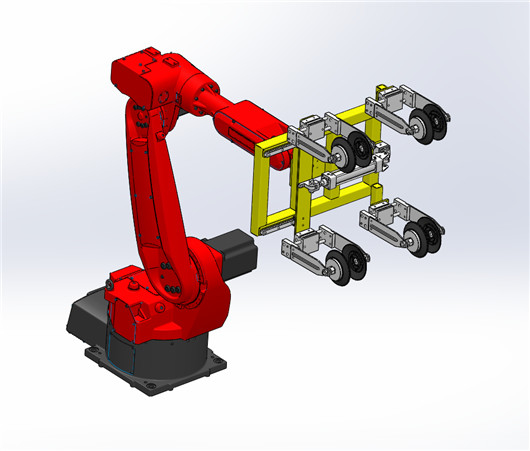
در حال حاضر، با توجه به نیاز شرکتهای مختلف، WOMMER Worm اشکال و عملکردهای مختلفی از افکتکنندههای انتهایی ربات، از جمله دو محرک گیره موازی انگشتی و محرک گریپر موازی سه انگشتی را توسعه داده است.علاوه بر این، برای اینکه ربات بتواند قطعات کار بزرگ را به خوبی مدیریت کند، اثرگرهای انتهایی نیز وجود دارند که از نیروی پنوماتیک به عنوان منبع انرژی برای تامین انرژی جنبشی بیشتر برای ربات استفاده می کنند.
اثرگذارهای پایانی ربات تمرکز تحقیق و توسعه محصول ربات است.در حال حاضر، شرکت های تولید ربات مانند WOMMER Worm، افکت های انتهایی با عملکردها و ویژگی های مختلف توسعه داده اند و عملکرد کاری عالی را برای شرکت ها در استفاده عملی ارائه کرده اند.
![]()
در مورد شرکت
ریل راهنما ما با بسیاری از برندهای ربات معروف بین المللی مانندABB KUKA FANUC Yaskawa UR.شرکت های درگیر عمدتا شامل پالت سازی، بارگیری و تخلیه هستند.بار ریل راهنما از500 تا 5000 کیلوگرمطول ریل راهنما با توجه به نیاز مشتریان سفارشی می شود.ما موردی ایجاد کردهایم که یک ربات ABB IRB6700 مربوط به 20 دستگاه CNC است و یک ریل راهنما به طول 50 متر حرکت رفت و برگشتی، بارگیری و تخلیه ربات را تکمیل میکند.تعداد ربات ها به شدت کاهش می یابد و در هزینه یکپارچه سازی صرفه جویی می شود.
شرکت ما همچنین رباتهای صنعتی را با قیمتهای بسیار مناسب ارائه میدهد تا با قیمتهای پایینتر سفارش دهند.
برای بررسی ربات ها و ریل های ما به شانگهای، چین خوش آمدید!
تامین محصولات شرکت
ربات ABB
ربات KUKA
ربات یاسکاوا
ربات فانوک
ربات UR
Cobot
راه آهن راهنما
Cobot ساخت چین
مشخصات محصول
| مدل | LT-PG2-80B-PB |
| ضربه تک انگشتی (میلی متر) | 4 |
| حداقل نیروی نگهدارنده (N) | / |
| نیروی بسته شدن (N) | 3780 |
| ژانگ کایلی (N) | 4120 |
| وزن پیشنهادی قطعه کار (کیلوگرم) ① | 18.9 |
| وزن خود (کیلوگرم) | 1.1 |
| حداقل فشار هوا (Mpa) | 0.4 |
| فشار نامی هوا (Mpa) | 0.6 |
| حداکثر فشار هوا (Mpa) | 0.6 |
| سطح حفاظت (IP) | IP40 |
| زمان باز/بسته شدن (ها) | 0.1/0.1 |
| دقت تکراری (mm) | 0.01 |
| مصرف گاز (cm3) (دو طرفه) | 120 |
| حداکثر طول انگشت (میلی متر) | 80 |
| حداکثر وزن انگشتان (کیلوگرم) | 0.6 |
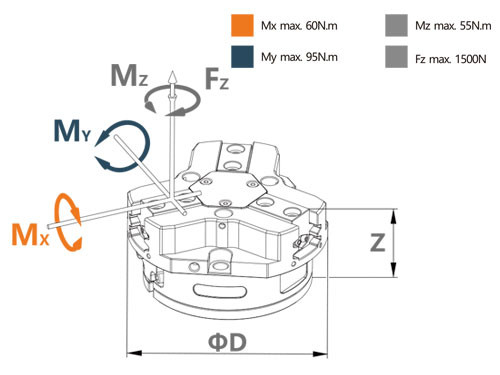
| گشتاور Mx (N · متر) | 60 |
| لحظه من (N · m) | 95 |
| لحظه Mz (N · m) | 55 |
| حداکثر نیروی محوری Fz (N) | 1500 |
جدول پارامترهای محصول
![]()
![]()
![]()
بسته بندی و حمل و نقل
![]()
![]()
درخواست خود را مستقیماً برای ما ارسال کنید

