
محل منبع:
چین
نام تجاری:
YOUNGYOU
گواهی:
CE
شماره مدل:
PY4030U-050
با ما تماس بگیرید
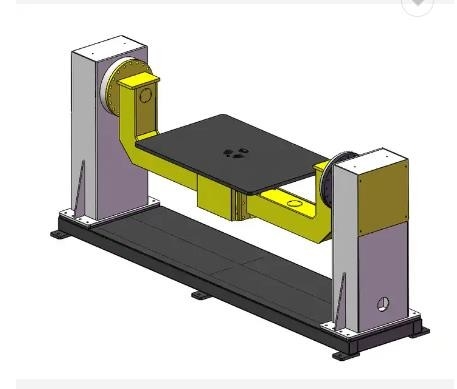




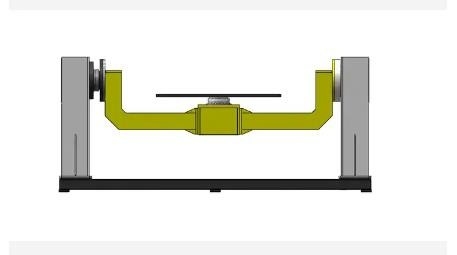
ساخت چین 1200*1200 میز گردان 380 ولت 50-60 هرتز بار محوری 100-1000 کیلوگرم پوزیشنر جوش دو محوره
فناوری ناوبری و موقعیت یابی بازتاب نور برای ربات های متحرک
روش معمول موقعیت یابی ناوبری بازتاب نور عمدتاً از حسگرهای لیزری یا مادون قرمز برای محدوده استفاده می کند.لیزر و مادون قرمز هر دو از فناوری بازتاب نور برای ناوبری و موقعیت یابی استفاده می کنند.
سیستم موقعیت یابی جهانی لیزر به طور کلی از یک مکانیسم چرخش لیزری، یک بازتابنده، یک دستگاه گیرنده نوری الکترونیکی و یک دستگاه جمع آوری و انتقال داده تشکیل شده است.
در حین کار، لیزر از طریق یک مکانیسم آینه چرخان به بیرون ساطع می شود.هنگام اسکن یک نقطه عطف مشارکتی متشکل از یک بازتابنده عقب، نور منعکس شده توسط یک گیرنده فوتوالکتریک به عنوان یک سیگنال تشخیص پردازش می شود.برنامه اکتساب داده برای خواندن داده های دیسک کد مکانیزم چرخان (مقدار زاویه اندازه گیری شده هدف) شروع می شود و سپس برای پردازش داده ها از طریق ارتباط به رایانه بالایی منتقل می شود.بر اساس موقعیت شناخته شده نقطه عطف و اطلاعات شناسایی شده، موقعیت و جهت فعلی سنسور در سیستم مختصات نشانه را می توان برای دستیابی به ناوبری و موقعیت یابی بیشتر محاسبه کرد.
برد لیزر دارای مزایای پرتو باریک، موازی بودن خوب، پراکندگی کوچک و وضوح بالا در جهت برد است، اما به شدت تحت تأثیر عوامل محیطی نیز قرار دارد.بنابراین، نحوه حذف نویز سیگنال جمعآوریشده هنگام استفاده از محدوده لیزری نیز یک چالش بزرگ است.علاوه بر این، برد لیزر دارای نقاط کور نیز می باشد، که دستیابی به ناوبری و موقعیت یابی تنها با لیزر را دشوار می کند.در کاربردهای صنعتی، به طور کلی، هنوز به طور گسترده در آزمایش های صنعتی در محل در یک محدوده خاص، مانند تشخیص ترک های خط لوله استفاده می شود.
فناوری سنجش مادون قرمز اغلب در سیستمهای جلوگیری از موانع ربات چند مفصلی استفاده میشود تا ناحیه بزرگی از "پوست حساس" روبات را تشکیل دهد که سطح بازوی ربات را میپوشاند و میتواند اشیاء مختلفی را که بازوی ربات در حین کار با آنها مواجه میشود، شناسایی کند.
یک سنسور مادون قرمز معمولی شامل یک دیود ساطع کننده نور حالت جامد است که می تواند نور مادون قرمز ساطع کند و یک دیود حساس به نور حالت جامد که به عنوان گیرنده عمل می کند.سیگنال مدوله شده توسط یک لوله ساطع کننده نور مادون قرمز ساطع می شود و لوله حساس به نور مادون قرمز سیگنال مدوله شده مادون قرمز منعکس شده توسط هدف را دریافت می کند.حذف تداخل مادون قرمز محیطی با مدولاسیون سیگنال و فیلتر مادون قرمز اختصاصی تضمین می شود.اگر سیگنال خروجی Vo نشان دهنده ولتاژ خروجی شدت نور منعکس شده باشد، Vo تابعی از فاصله بین پروب و قطعه کار است: Vo=f (x, p)، که در آن p ضریب بازتاب قطعه کار است.P به رنگ سطح و زبری جسم مورد نظر مربوط می شود.X - فاصله بین پروب و قطعه کار.
وقتی قطعه کار هدفی از همان نوع با مقدار p یکسان باشد، x و Vo یک به یک مطابقت دارند.X را می توان با درون یابی داده های تجربی اندازه گیری مجاورت اشیاء هدف مختلف به دست آورد.به این ترتیب می توان با استفاده از حسگرهای مادون قرمز فاصله بین ربات و جسم مورد نظر را اندازه گیری کرد و همچنین از روش های دیگر پردازش اطلاعات برای جهت یابی و مکان یابی ربات متحرک استفاده کرد.
اگرچه موقعیت یابی حسگر مادون قرمز دارای مزایایی مانند حساسیت بالا، ساختار ساده و هزینه کم است، اما به دلیل وضوح زاویه بالا و تفکیک مسافت کم، معمولاً به عنوان سنسور مجاورت در روبات های متحرک برای تشخیص موانع حرکتی نزدیک یا ناگهانی استفاده می شود که تسهیل اضطراری است. توقف ربات ها
![]()
در مورد شرکت
ریل راهنما ما با بسیاری از برندهای ربات معروف بین المللی مانندABB KUKA FANUC Yaskawa UR.شرکت های درگیر عمدتا شامل پالت سازی، بارگیری و تخلیه هستند.بار ریل راهنما از500 تا 5000 کیلوگرمطول ریل راهنما با توجه به نیاز مشتریان سفارشی می شود.ما موردی ایجاد کردهایم که یک ربات ABB IRB6700 مربوط به 20 دستگاه CNC است و یک ریل راهنما به طول 50 متر حرکت رفت و برگشتی، بارگیری و تخلیه ربات را تکمیل میکند.تعداد ربات ها به شدت کاهش می یابد و در هزینه یکپارچه سازی صرفه جویی می شود.
شرکت ما همچنین رباتهای صنعتی را با قیمتهای بسیار مناسب ارائه میدهد تا با قیمتهای پایینتر سفارش دهند.
برای بررسی ربات ها و ریل های ما به شانگهای، چین خوش آمدید!
تامین محصولات شرکت
ربات ABB
ربات KUKA
ربات یاسکاوا
ربات فانوک
ربات UR
Cobot
راه آهن راهنما
Cobot ساخت چین
مشخصات محصول
جدول پارامترهای محصول

بسته بندی و حمل و نقل
![]()
![]()
درخواست خود را مستقیماً برای ما ارسال کنید





